// 02
Ground Control Console
Frames below are screen captures of the coordinator in operation — a live tanker fleet under auto-dispatch, with telemetry refreshing at 1 Hz.
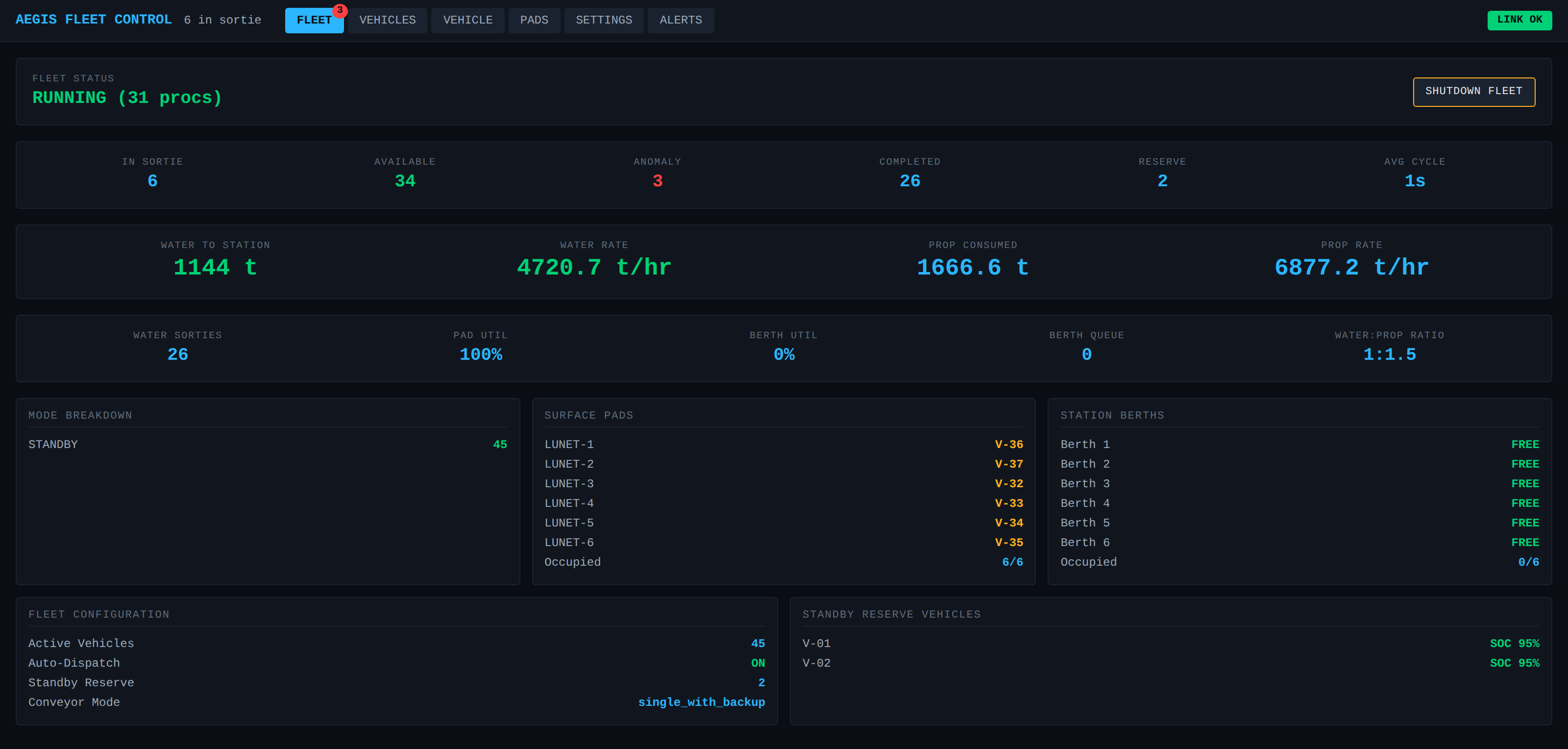
FIG. 01 — Fleet Overview: water throughput, mode breakdown, pad & berth occupancy
FC-CONSOLE-001
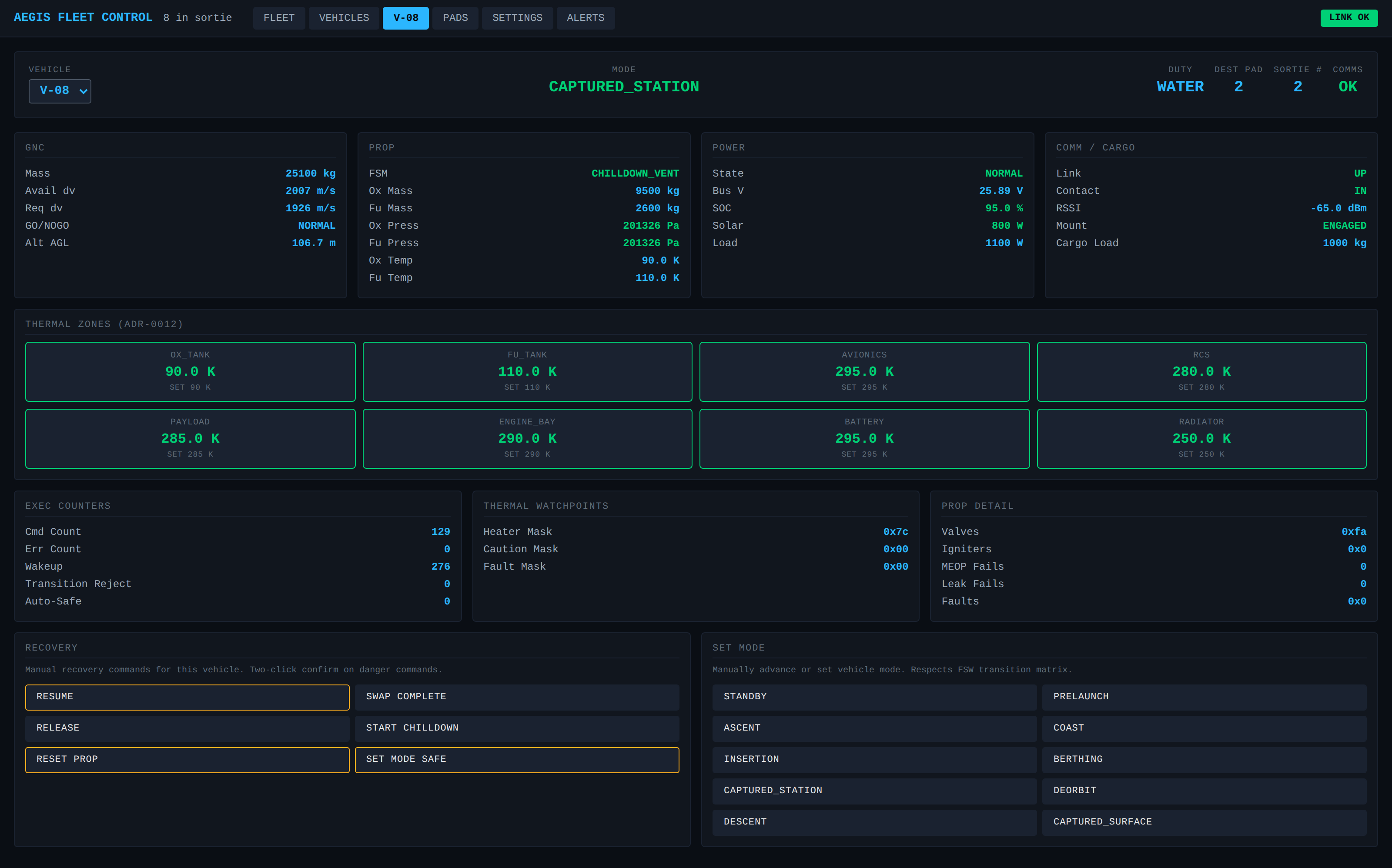
FIG. 02 — Vehicle Detail: GNC, propulsion, power, thermal zones & recovery commands
FC-CONSOLE-002
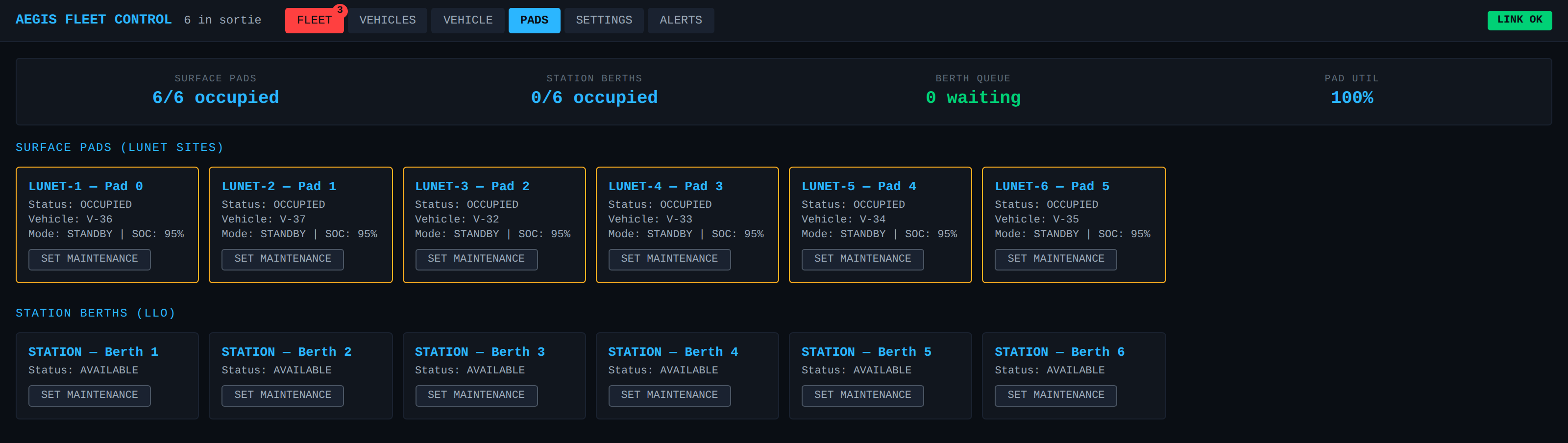
FIG. 03 — Pad & Berth Status: 6 LUNET surface pads, 6 station berths, FIFO berthing queue
FC-CONSOLE-003
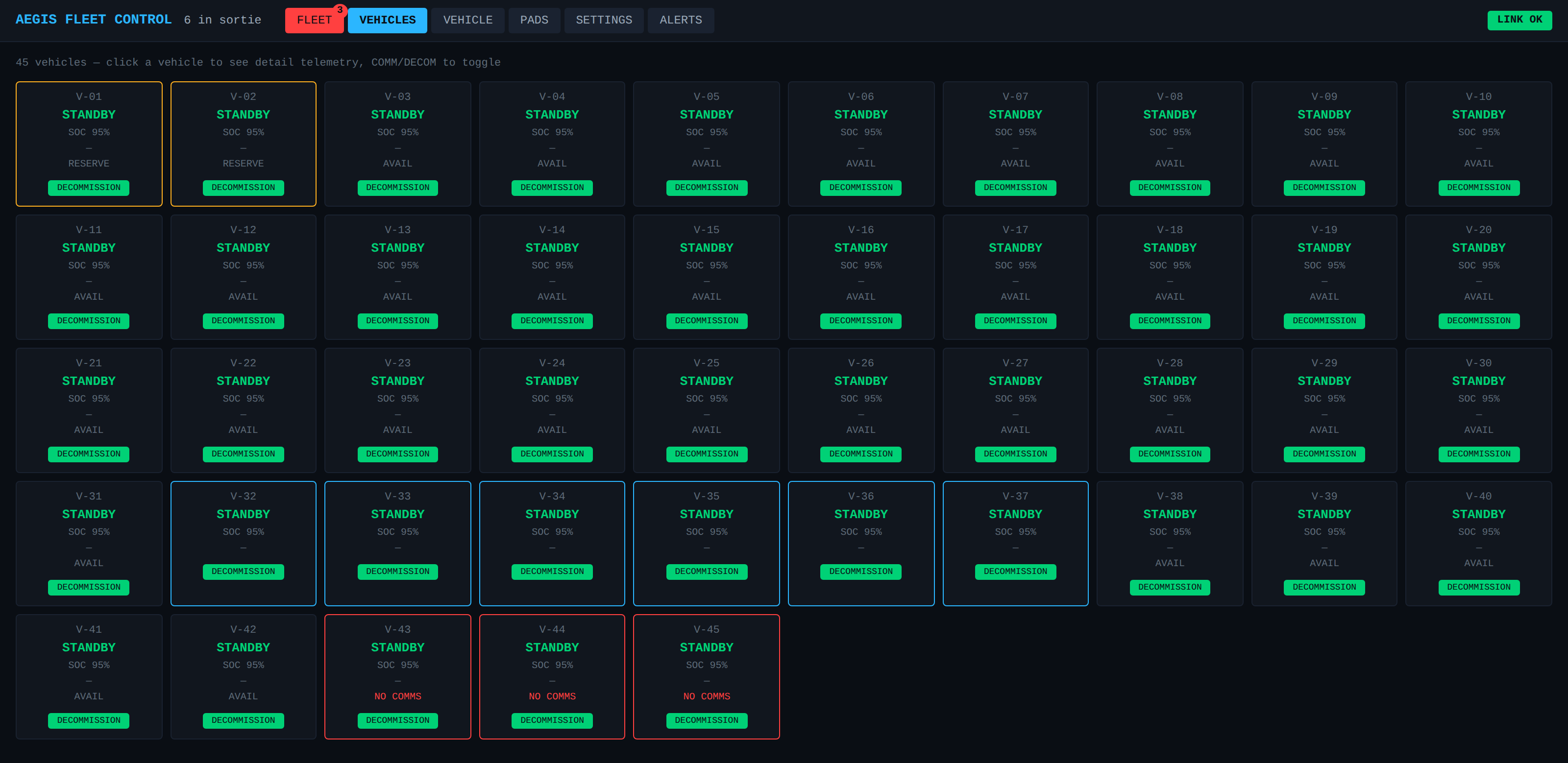
FIG. 04 — Vehicle Grid: per-ship mode, charge, reserve and comms health — offline ships flagged in red
FC-CONSOLE-004
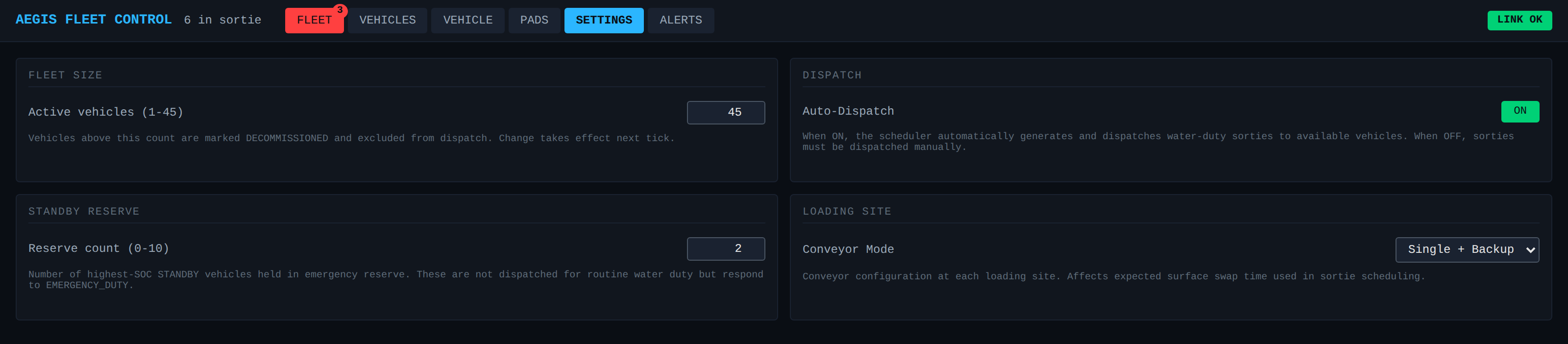
FIG. 05 — Coordinator Settings: fleet size, auto-dispatch, standby reserve, loading-site mode
FC-CONSOLE-005