Centrifugal Water Shield Segment Demonstration (CWSSD)
What this page is
This is a neutral definition of a minimal “CWSSD-class” investigation: a compact, free-flying capability for measuring the dynamic behavior of large fluid masses during in-orbit fill and controlled rotation. It is not a product announcement, not a solicitation, and not a claim of planned development.
Why this capability is needed
As orbital architectures move from one-off demonstrations toward large-mass infrastructure, a practical operational gap becomes more consequential: quantified fluid behavior at the scale and configuration these systems actually use.
- Large-mass fluid shielding introduces mass asymmetry, slosh dynamics, gas entrapment, and spin-up resonance that ground testing cannot fully replicate.
- “The fluid will settle under spin” is not a substitute for measured redistribution across the surface-tension-to-acceleration transition.
- Partial-fill behavior differs materially from full-fill behavior, and operational fill is performed on orbit rather than pre-loaded on the ground.
Scope of application
CWSSD-class characterization should precede or accompany:
- Large orbital habitats with water-based radiation shielding
- Propellant depots and in-space fluid storage
- Radiation-shielded deep-space vehicles
- Artificial-gravity systems relying on rotating fluid mass
- In-space life-support water storage at scale
CWSSD-class characterization complements structural and radiation payloads; it is focused on operational fluid mechanics rather than shielding-material performance.
Measurement objectives
Primary (minimum) objectives
- Characterize incremental fill stability in microgravity, including gas entrapment and surface topology
- Measure water redistribution through the surface-tension- to acceleration-dominated transition
- Quantify slosh response and suppression as a function of fill fraction and spin rate
- Measure induced imbalance torques and structural loads during controlled spin-up
Recommended (mission-dependent)
- Demonstrate rebalancing strategies using internal flow routing during non-steady operations
- Capture disturbance recovery following spin-rate modulation, attitude changes, and partial drain/refill
- Validate reversibility through controlled de-spin and drain
Functional requirements (requirements-style)
| ID | Function | Requirement |
|---|---|---|
| CWSSD-F-001 | On-orbit fill |
The system shall transfer water incrementally into the shielding tank in microgravity and measure fluid surface topology, gas migration, and structural load at each fill increment.
Partial-fill Gas entrapment Surface geometry
|
| CWSSD-F-002 | Controlled spin-up |
The system shall produce programmable rotation from zero to a defined artificial-gravity equivalent and measure water redistribution across the surface-tension-to-acceleration transition.
Regime transition Redistribution
|
| CWSSD-F-003 | Slosh characterization |
The system shall measure slosh response across fill fractions and spin rates and evaluate suppression performance of internal segmentation.
Slosh curves Baffle performance
|
| CWSSD-F-004 | Imbalance & load sensing |
The system shall measure induced imbalance torques and tank-wall structural loads throughout fill and spin-up operations.
Mass asymmetry Load evolution
|
| CWSSD-F-005 (recommended) | Disturbance recovery |
The system should introduce controlled disturbances (spin-rate modulation, attitude change, drain/refill) and demonstrate rebalancing via internal flow routing.
Controllability Fault tolerance
|
| CWSSD-F-006 | Reversibility |
The system shall demonstrate controlled de-spin and drain to validate safe shutdown of the fluid system.
Recoverability Safe shutdown
|
| CWSSD-F-007 | Time synchronization |
The system shall timestamp all measurements and synchronize fluid, structural, and attitude data to support reconstruction of test conditions.
Engineering traceability
|
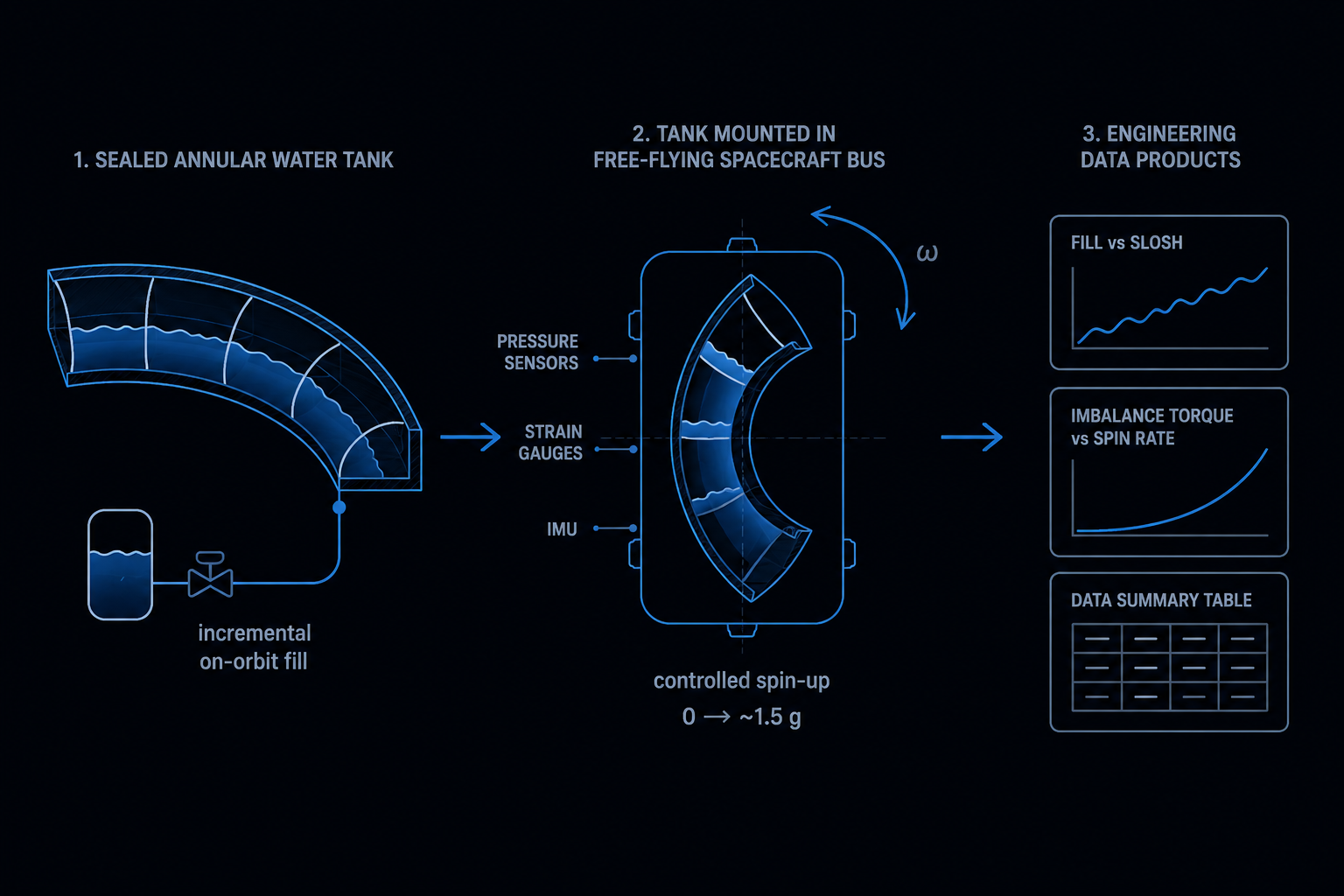
Note: quantitative thresholds (water volume, spin rate, accuracies) are mission- and platform-dependent and should be set by the requirements of the target shielding or artificial-gravity system. A representative baseline uses a 50–150 L configurable annular volume and a 0 to ~1.5 g equivalent programmable spin range in low Earth orbit.
Conceptual device elements
- Annular tank: sealed, instrumented curved annular segment (toroidal sector) geometry
- Internal segmentation: curved, soft-cell-inspired baffles avoiding sharp corners, for slosh suppression
- Fill system: onboard reservoir and metering for incremental on-orbit transfer
- Spin platform: self-contained free-flying bus with programmable rotation and attitude stabilization
- Sensor set (minimum): multi-point pressure, flow, tank-wall strain, IMU and torque, internal imaging, temperature
- Optional: internal flow-routing for active rebalancing
Minimal test recipe (single-mission class)
- Baseline zero-g diagnostics — pressure response, gas distribution, sensor calibration (no rotation)
- Incremental fill — controlled mass steps (e.g., 5–10 L), imaging surface topology and gas migration between steps
- Low-g spin initiation (≤0.3 g) — observe the surface-tension- to acceleration-dominated transition
- Progressive spin-up (0.3 g → 1.0 g) — multiple dwell points, imbalance and slosh measurement
- Disturbance testing — spin-rate modulation, attitude change, drain/refill, rebalancing trials
- De-spin and drain — final diagnostics, validate reversibility, passivate or deorbit
This recipe is intentionally compact: it prioritizes engineering-usable stability and scaling parameters over broad exploratory data collection.
Data products
CWSSD-class investigations should deliver a small set of standardized outputs suitable for habitat, depot, and artificial-gravity design:
Plots (minimum set)
- Fill fraction vs surface topology / gas entrapment (per increment)
- Spin rate vs slosh response (across fill fractions)
- Imbalance torque and structural load vs spin rate
Tables (minimum set)
- Test metadata: configuration, timestamps, instrument setup
- Stability envelopes for fill/spin combinations
- Derived scaling parameters and uncertainty bounds
Where it fits in mission planning
- Precursor step before committing to large water-based shielding, fluid storage, or rotating-fluid artificial-gravity architectures
- Input to structural, attitude-control, and fill-system design for large-mass platforms
- Complements radiation and structural payloads by addressing fluid-dynamic uncertainty
- Improves design margins and reduces conservatism driven by unknown large-mass fluid behavior
Why a flight demonstration
- The defining behaviors — partial-fill stability, the surface-tension-to-acceleration transition, and large-mass slosh under spin — depend on sustained microgravity and controlled rotation at a scale and duration unreachable in drop towers or parabolic flight.
- Ground campaigns remain the appropriate precursor for instrument calibration, baffle-geometry screening, and modeling validation.
- The flight demonstration addresses the regimes those campaigns cannot reach, producing flight-validated scaling data.
This sequencing keeps ground work as the front end of the investigation rather than something the flight is intended to replace.
Relationship to mission risk
Absence of CWSSD-class measurements prior to committing to large-mass fluid shielding or rotating-fluid systems constitutes a known engineering risk, including uncontrolled mass migration, spin-up resonance, persistent imbalance, and structural overload.
Because these measurements underpin the feasibility and certification of large human-rated platforms, the underlying capability and its data products should be operator-owned, auditable, and repeatable across missions.
CWSSD-class characterization reduces epistemic uncertainty; it does not eliminate all risk and does not replace disciplined operational constraints.
Standardization potential
Standardizing CWSSD-class investigations enables cross-configuration comparability and accumulation of empirical large-mass fluid datasets. Over time, this reduces the need to re-derive fill and spin-up behavior for each new platform and supports better-grounded design and operational margins.